該文以電池Thevenin二階等效電路模型為基礎(chǔ),運(yùn)用自適應(yīng)無跡卡爾曼濾波(AUKF)算法對電池SOC和歐姆內(nèi)阻進(jìn)行實(shí)時(shí)估算,并根據(jù)歐姆內(nèi)阻與電池SOH的函數(shù)對應(yīng)關(guān)系,實(shí)時(shí)估算電池SOH。在兩種不同工況下對電池做充放電實(shí)驗(yàn),驗(yàn)證了該方法的可行性和準(zhǔn)確性。
并通過對鋰離子電池組中各單體電池及電池組整體健康狀態(tài)的估算,定位不合格單體電池,量化電池組的完好度,制定明確的電動(dòng)汽車動(dòng)力鋰離子電池組的梯次利用方案,實(shí)現(xiàn)廢舊動(dòng)力電池的資源利用最大化。
隨著世界能源消耗的日益增加,大氣污染日漸嚴(yán)重,發(fā)展新能源汽車成為現(xiàn)代工業(yè)發(fā)展的重要任務(wù)。其中,電動(dòng)汽車以其效率高、污染小等特點(diǎn)備受關(guān)注。鋰離子動(dòng)力電池組是電動(dòng)汽車中唯一的儲(chǔ)能環(huán)節(jié),當(dāng)電動(dòng)汽車動(dòng)力電池組性能下降到原性能的80%時(shí),將不再適合在電動(dòng)汽車中使用。
動(dòng)力電池組的制造工藝先進(jìn),即使退役后仍然保持很高的安全性和電性能,若將這些鋰電池進(jìn)行回收處理將造成極大浪費(fèi),故可考慮將退役動(dòng)力電池進(jìn)行梯次回收利用。由于動(dòng)力電池組不同單體電池在使用過程中自放電程度、環(huán)境溫度等因素的不同,導(dǎo)致退役的動(dòng)力電池的容量、內(nèi)阻、電壓存在不一致性,各單體電池老化程度存在差異。因此,若要實(shí)現(xiàn)合理的梯次利用,需要對鋰離子動(dòng)力電池組內(nèi)各單體電池狀態(tài)進(jìn)行重新評估。
電動(dòng)汽車用鋰離子電池的狀態(tài)主要通過電池的荷電狀態(tài)(State of Charge, SOC)和健康狀態(tài)(State of Health, SOH)來表征。SOC是電池當(dāng)前的剩余容量與標(biāo)稱容量之比,能直接反映電池的剩余容量,也能直接反映電動(dòng)汽車當(dāng)前的最多行駛里程,是鋰電池能量管理的重要決策參數(shù)之一;SOH是電池當(dāng)前所能充入的最大電量與額定容量的比值,表征電池的老化程度,體現(xiàn)在電池內(nèi)部活性物質(zhì)減少,實(shí)際容量減小,內(nèi)阻增大等。準(zhǔn)確估計(jì)鋰離子電池組電池狀態(tài),是動(dòng)力鋰離子電池梯次利用的關(guān)鍵技術(shù)之一。
現(xiàn)有的電池SOC估計(jì)方法可分為以下四類:
①安時(shí)積分法:該方法屬于開環(huán)工作模式,從SOC的定義出發(fā),通過計(jì)算采樣電流對時(shí)間的積分得到實(shí)時(shí)的電池SOC。在SOC初始值準(zhǔn)確的情況下,該方法短時(shí)間內(nèi)能保持較高精度,但隨著工作時(shí)間增加,由于不確定的庫倫效率和測試電流的誤差累積,使得此方法精度越來越低,無法長時(shí)間獨(dú)立使用。
②特征參量法:電池的特征參量通常為電池的開路電壓(Open-Circuit Voltage, OCV)和內(nèi)阻。開路電壓法通過建立電池OCV與SOC的對應(yīng)關(guān)系,通過測量OCV來得到對應(yīng)的SOC值,但電池的開路電壓值較難獲得,需要靜置較長時(shí)間,導(dǎo)致該方法誤差較大。測量內(nèi)阻法由于測試設(shè)備昂貴,測試方法較為復(fù)雜,無法滿足在線估計(jì)的要求。
③數(shù)據(jù)驅(qū)動(dòng)法:該方法通過數(shù)據(jù)驅(qū)動(dòng)的方式對電池進(jìn)行建模,再運(yùn)用到電池狀態(tài)估計(jì)中,該方法主要有模糊邏輯、人工神經(jīng)網(wǎng)絡(luò)、模糊神經(jīng)網(wǎng)絡(luò)和支持向量機(jī)等。這類方法很大程度上依靠訓(xùn)練數(shù)據(jù)的全面性和有效性,在電池的老化過程中,隨著電池特性的變化,訓(xùn)練數(shù)據(jù)會(huì)逐漸失效,從而影響估計(jì)效果。
④基于多種方法融合的估計(jì)方法:此類估計(jì)方法基于電池模型,屬于閉環(huán)工作模式,最具代表性的有自適應(yīng)擴(kuò)展卡爾曼濾波技術(shù)、雙擴(kuò)展卡爾曼濾波技術(shù)、魯棒擴(kuò)展卡爾曼濾波技術(shù)、粒子濾波技術(shù)等。這類方法將多種SOC估計(jì)方法有機(jī)地融合,揚(yáng)長避短,使其能有效地對SOC進(jìn)行實(shí)時(shí)追蹤,是當(dāng)前SOC估計(jì)研究最熱門的方向。
現(xiàn)有的電池SOH估計(jì)方法主要有以下幾種:
①直接放電法:是利用負(fù)載對電池SOH的影響進(jìn)行評價(jià)的方法,該方法操作復(fù)雜,需要離線測試電池的SOH,無法實(shí)現(xiàn)實(shí)時(shí)在線監(jiān)測;
②測量內(nèi)部阻抗法:電池的SOH可以用歐姆內(nèi)阻的關(guān)系式來表征,通過測量分析得到電池的歐姆內(nèi)阻,從而計(jì)算得到電池的SOH;
③電化學(xué)阻抗分析法(Electrochemical Impedance Spectroscopy, EIS):該方法的主要思想是對待測電池施加多個(gè)正弦信號(hào),利用模糊理論對得到的數(shù)據(jù)信息進(jìn)行分析,預(yù)測電池的老化程度,此方法需要大量的實(shí)驗(yàn)數(shù)據(jù),實(shí)用性較低;
④化學(xué)分析法:該方法通過測量電解液密度的變化來對SOH進(jìn)行估計(jì),但該方法必須破壞電池結(jié)構(gòu),使得電池不能再繼續(xù)使用;
⑤現(xiàn)代估計(jì)方法:主要有卡爾曼濾波算法、神經(jīng)網(wǎng)絡(luò)算法、模糊邏輯算法等,這些方法能對電池的狀態(tài)進(jìn)行定性定量的分析,實(shí)際應(yīng)用效果較好。
針對目前電池狀態(tài)估計(jì)精度較低、時(shí)效性差等問題,本文采用鋰離子電池二階Thevenin等效電路模型,并運(yùn)用自適應(yīng)無跡卡爾曼濾波(Adaptive Unscented Kalman Filter, AUKF)算法對電池狀態(tài)進(jìn)行實(shí)時(shí)估計(jì)。
自適應(yīng)無跡卡爾曼濾波算法結(jié)合無跡卡爾曼濾波算法和擴(kuò)展卡爾曼算法,建立循環(huán)迭代關(guān)系,已知電池參數(shù)估計(jì)電池狀態(tài),再將電池狀態(tài)作為已知量估計(jì)模型參數(shù),以此類推進(jìn)行遞推運(yùn)算,實(shí)時(shí)估計(jì)電池SOC及歐姆內(nèi)阻。
利用歐姆內(nèi)阻與電池SOH的函數(shù)對應(yīng)關(guān)系,可實(shí)時(shí)估計(jì)電池SOH。并通過對電池組中各單體電池及電池組整體健康狀態(tài)的估算,對電池組的剩余利用價(jià)值進(jìn)行量化,制定明確的電動(dòng)汽車動(dòng)力鋰離子電池組的梯次利用方案。
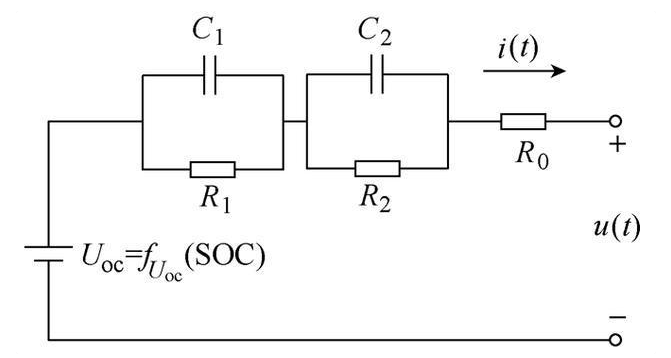
圖1 電池二階Thevenin等效電路模型
結(jié)論
1)本文以電池的二階Thevenin等效電路模型為基礎(chǔ),設(shè)計(jì)了自適應(yīng)無跡卡爾曼濾波算法。實(shí)驗(yàn)驗(yàn)證了自適應(yīng)無跡卡爾曼濾波算法在兩種不同的電流工況下估算電池端電壓及電池SOC的準(zhǔn)確性,且該算法不受電流工況的限制,同時(shí)驗(yàn)證了該算法可以實(shí)時(shí)辨識(shí)出電池的歐姆內(nèi)阻。
2)本文應(yīng)用自適應(yīng)無跡卡爾曼濾波算法辨識(shí)時(shí)變電池系統(tǒng)的歐姆內(nèi)阻,再利用內(nèi)阻與電池SOH的函數(shù)關(guān)系實(shí)時(shí)估算電池的SOH,并通過實(shí)驗(yàn)驗(yàn)證了其估算精度。該算法的運(yùn)算速度快,精度高,具有很好的實(shí)用性。
3)本文通過對鋰離子電池組中各單體電池的SOH及平均單體電池SOH的估算,定位不合格單體電池,量化電池組的完好度,明確制定電動(dòng)汽車動(dòng)力電池組老化單體電池替換維護(hù)方案,實(shí)現(xiàn)廢舊動(dòng)力電池的資源利用最大化,并驗(yàn)證了該方案的可行性。
4)采用自適應(yīng)無跡卡爾曼濾波算法不但可以估計(jì)電池的SOC和歐姆內(nèi)阻,在該電池模型的基礎(chǔ)上,針對不同的參數(shù)建立狀態(tài)空間模型,也可以實(shí)現(xiàn)對電池模型的極化特性進(jìn)行實(shí)時(shí)的在線估計(jì)。